«Фёдора» заменила «Марфа»
 Космонавты Анна Кикина и Дмитрий Петелин приняли участие в апробации программы и методики совместной операторской деятельности космонавтов по применению антропоморфного робота совмещенного с мобильной платформой в рамках НИР «Созвездие - ЛМО», которая уже более 10 лет проходит в ЦПК.
Космонавты Анна Кикина и Дмитрий Петелин приняли участие в апробации программы и методики совместной операторской деятельности космонавтов по применению антропоморфного робота совмещенного с мобильной платформой в рамках НИР «Созвездие - ЛМО», которая уже более 10 лет проходит в ЦПК.
Марфу или мобильного антропоморфного робота, функционирующего автономно, можно назвать наследником робота Фёдора, с которым на борту МКС в 2019 году проводили эксперимент «Испытатель» космонавты Александр Скворцов и Алексей Овчинин. После того, как Фёдора вернули на Землю, сотрудники управления научно-прикладных исследований проблем подготовки космонавтов ЦПК проводили испытания, чтобы усовершенствовать управление роботом и передать рекомендации разработчикам. Космонавты Сергей Прокопьев, Анна Кикина и Дмитрий Петелин с помощью задающего устройства копирующего типа (ЗУКТ) и шлема виртуальной реальности управляли «руками» Фёдора, а специалисты снимали фоновые показания до и после полёта на МКС, чтобы выявить изменения, которые происходят в работе операторов (космонавтов).
 Результаты этих исследований учтены АО «НПО «Андроидная техника» из Магнитогорска при разработке Марфы. Нынешний опытный образец в перспективе подразумевает потенциальную возможность работы на поверхности Луны. Например, Марфа может собирать грунт. В своих «руках» в земных условиях она удержит до 5 кг груза, что эквивалентно30 кг на спутнике Земли! Работает андроид за счёт батарей, сейчас, в экспериментальных условиях, его зарядки хватает на 2,5 часа, но в будущем, в случае использования Марфы на Луне, предполагается использование более мощных источников энергии, которые позволят работать автономно в режиме 24/7.
Результаты этих исследований учтены АО «НПО «Андроидная техника» из Магнитогорска при разработке Марфы. Нынешний опытный образец в перспективе подразумевает потенциальную возможность работы на поверхности Луны. Например, Марфа может собирать грунт. В своих «руках» в земных условиях она удержит до 5 кг груза, что эквивалентно30 кг на спутнике Земли! Работает андроид за счёт батарей, сейчас, в экспериментальных условиях, его зарядки хватает на 2,5 часа, но в будущем, в случае использования Марфы на Луне, предполагается использование более мощных источников энергии, которые позволят работать автономно в режиме 24/7.
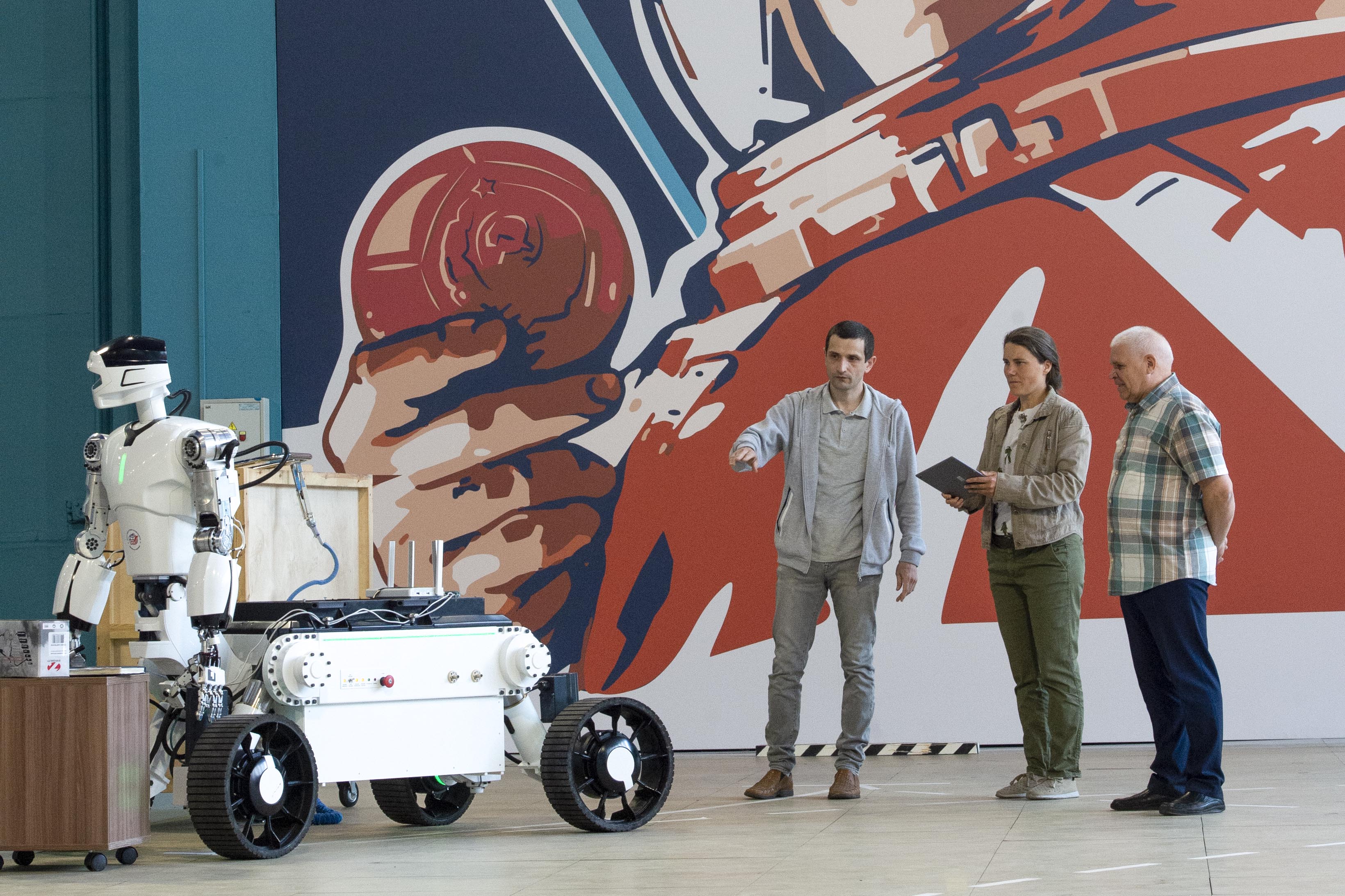
– У Марфы есть несколько режимов управления, – рассказал Владимир Дикарев, начальник управления научно-прикладных исследований проблем подготовки космонавтов, – робот может действовать автоматически, но в случае нештатных ситуаций космонавт управляет им вручную. Для этого оператору необходимо надеть ЗУКТ и работать с помощью планшета. Кроме того, существует супервизорный режим управления: то есть Марфа самостоятельно подъезжает к объекту по заранее заданной программе, распознаёт (на опытной площадке) кнопки или тумблеры и нажимает на них, выполняя определённые действия. Также как и положено антропоморфному существу, робот реагирует на голос: получив команду, он едет её выполнять.
 При управлении Марфой с помощью ЗУКТа возникает рассогласование в действиях между «руками» робота и экзоскелетом, в котором работают операторы-космонавты, так как у каждого человека есть индивидуальные физические показатели, например, длина руки, а у андроида такие показатели – константа. Исследованием указанных рассогласований занимаются практиканты МАИ, студентки третьего курса Виктория Епихина и Александра Иванова. Их расчёты, в том числе, лягут в основу рекомендаций для разработчиков робота.
При управлении Марфой с помощью ЗУКТа возникает рассогласование в действиях между «руками» робота и экзоскелетом, в котором работают операторы-космонавты, так как у каждого человека есть индивидуальные физические показатели, например, длина руки, а у андроида такие показатели – константа. Исследованием указанных рассогласований занимаются практиканты МАИ, студентки третьего курса Виктория Епихина и Александра Иванова. Их расчёты, в том числе, лягут в основу рекомендаций для разработчиков робота.
Для космонавтов Анны Кикиной и Дмитрия Петелина, которые участвовали в эксперименте с предыдущим поколением антропоморфных роботов, при работе с Марфой было важно отработать действия в паре.
– Особенность нынешней апробации заключалась в том, что работали два оператора: один управлял мобильной платформой, другой через устройство копирующего типа – антропоморфным роботом, – пояснила Анна Кикина.
 Во время проведения эксперимента Марфа должна была подъехать к функциональной панели для выполнения манипуляций с органами управления, забрать имитацию научной аппаратуры, разместить на грузовой площадке и перевезти в заданную точку. Кроме того, отрабатывалась и работа с карабином – робот должен был отстегнуть его от стенда.
Во время проведения эксперимента Марфа должна была подъехать к функциональной панели для выполнения манипуляций с органами управления, забрать имитацию научной аппаратуры, разместить на грузовой площадке и перевезти в заданную точку. Кроме того, отрабатывалась и работа с карабином – робот должен был отстегнуть его от стенда.
– Мы планируем выдать свои рекомендации, чтобы новый тип таких робототехнических систем был исследован и включен в качестве эксперимента для будущих экипажей. Надеемся, что средства копирования (имитации) станут более лёгкими и удобными в использовании, так как в перспективе робототехника будет необходима для инопланетной деятельности, – высказал пожелание разработчикам Дмитрий Петелин.
 назад
назад